SpaDeX mission is the technology demonstration experiment conducted by ISRO on December 30, 2024, to master space docking technology. A PSLV rocket launched two satellites to test the efficiency of the newly developed Bharatiya Docking System. With this SpaDeX mission or Space Docking Experiment, India will become the fourth country after the USA, Russia, and China to master space docking technology, and it will help in future space missions like Chandryan-4 and Bharatiya Antariksh Station.
SPACE DOCKING
Space docking is the linking or joining of two space crafts in orbit.
Usually, it is common to dock an active vehicle with a passive target. Achieving this requires orbital manoeuvres that bring both vehicles into the same orbit and close to each other.
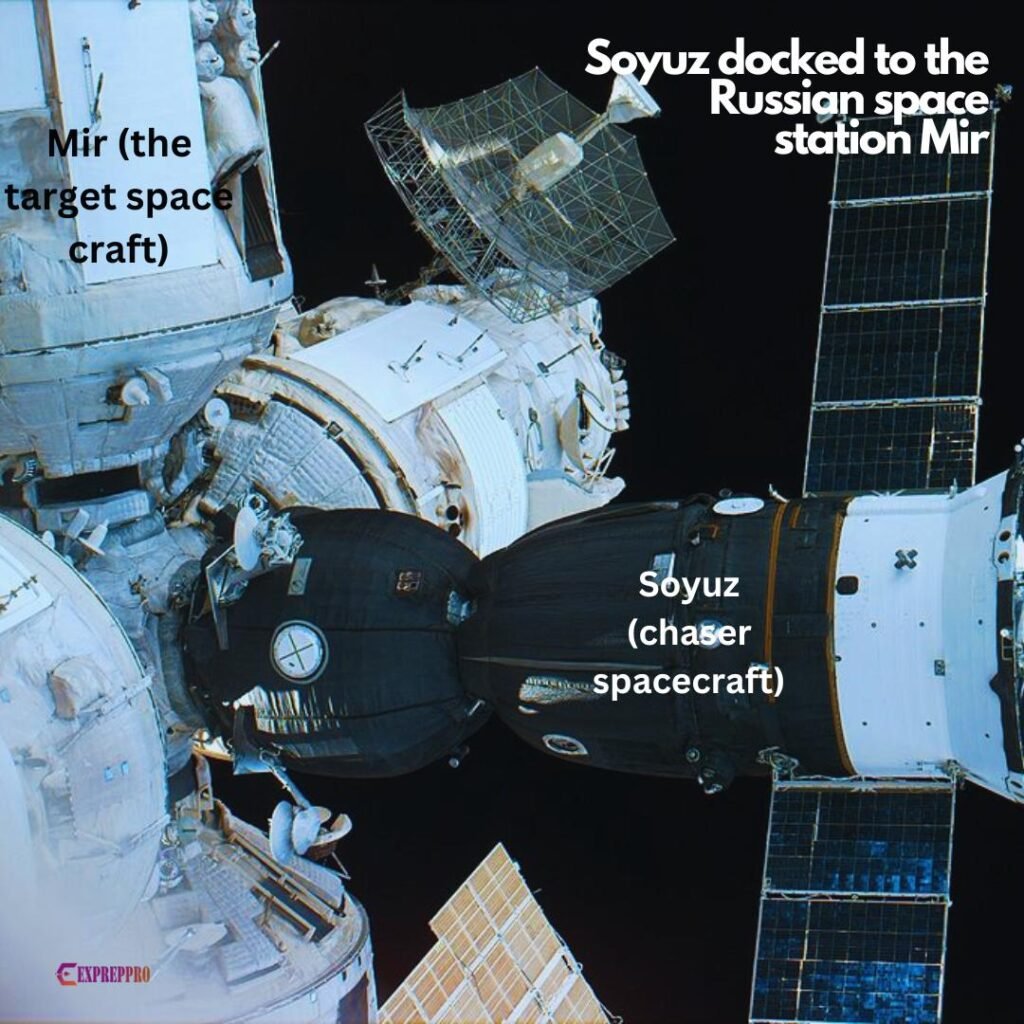
Space docking technology was used successfully in many missions, such as Gemini, Apollo, Soyuz, Mir and ISS.
In normal cases, the active vehicle is put on a gradual course towards the target with a reduced speed by the reaction control system. Then, orbital manoeuvres are conducted to align both active and passive crafts.
HISTORY OF SPACE DOCKING
The first linking of two orbiting space crafts took place on March 16 1966. Neil Armstrong and Dave Scott conducted this docking. They managed to manoeuvre a Gemini capsule toward an uncrewed “Agena” vehicle.
Even though well mastered and standardised, the manoeuvres remain risky, and safety is critical. A minor error may result in mishaps, such as the Progress or Mir accident in June 1997.
On April 3, 2008, “Jules Verne” performed a successful automatic docking manoeuvre with the space station. However, manually controlled docking is still preferred for servicing vehicles like the American Space Transportation System.
COOPERATIVE DOCKING AND NON-COOPERATIVE DOCKING
In general, docking missions comprise two spacecraft. They are a Chaser and a Target.
Chaser is a fully operational spacecraft that docks with other spacecraft.
Target is the key spacecraft to which the chaser is planned to dock. It is otherwise known as a chief or leader.
The docking can be either cooperative or non-cooperative.
In cooperative docking, targets provide their navigation solution states to the chaser and perform cooperative manoeuvres for docking.
In non-cooperative docking, targets cannot provide any information concerning their state, nor are they autonomously controlled.
STEPS IN SPACE DOCKING
In a typical case, the following are the steps in spacecraft docking.
- Phasing
- Far-range approach
- Short-range approch or Final approch
- Docking or Berthing
In case the spacecraft is on a service mission to any space station, two more steps are included in the list.
- Separation and Departure
- Deorbiting
Phasing:
This is the synchronisation of the chaser craft orbit with the target orbit. It is achieved by executing a number of orbit transfer manoeuvres.
Far-Range Approach:
The next step is initiated when the chaser craft achieves the desired velocity and position. In this stage, absolute guidance and navigation are usually replaced by relative guidance and navigation. At last, the spacecraft reaches the vicinity of the target.
Short-Range Approach:
Approaches at a very slow speed of 0.3m/ sec and prepare for the final dock.
Docking:
The docking manoeuvre depends on the country. For example, the USA uses an Androgenous peripheral docking system.
HOW DOES DOCKING IN THE SPACE WORK? A RUSSIAN EXAMPLE.
Phasing is performed in circular orbits and not in eccentric orbits.
Ground-rolled Hohmann Maneuvers perform for arrival to and departure from these phasing orbits.
The range approach is performed automatically by the onboard computers to align with the target craft.
The RF Kur system is utilised for navigation. This RF Kurs system provides relative distance and velocity as well as the bearing angles.
The final approach is performed with the sun shining from behind or 30 degrees to 60 degrees. So, the docking is well-illuminated. If anything goes wrong or the target is not earth-pointing, then the docking port generally is not parallel to the flight direction.
In this case, a fly-around manoeuvre is done to keep the spacecraft at a relative distance of 200 to 400 meters opposite the docking port.
Soyuz utilises a 3000 N main engine along with 14 thrusters of 130N and 12 thrusters of 26 n for position and altitude control.
SpaDeX SATELLITES A AND B
SpaDeX satellites weigh 220kg and are built on an extended microsat bus.
They are androgynous. Either of the spacecraft can act as a chaser during docking technology demonstration. Both SpaDeX satellites used in SpaDeX mission will be used to test technology for rendezvous and docking.
This mission also aims to test
- Power transfer between the docked spacecraft.
- Composite spacecraft control.
- Payload operations after undocking.
STEPS IN SpaDeX MISSION OR SpaDeX TECHNOLOGY DEMONSTRATION.
- Both satellites SpaDeX A and B are launched by PSLV-c60 independently and simultaneously to a 470-kilometer circular orbit at 55 degrees inclination. The local time cycle will be about 66 days.
- After separation, the incremental velocity will allow the satellite spacecraft to build a 10-20 km inter-satellite separation with respect to the chaser spacecraft within a day.
- The next step is the far-range approach. During this phase, both the target and chaser will be brought to the same orbit with identical velocity but separated by about 20 km.
- After the far-range approach, the next step is the short-range approach. During this phase, the distance between the chaser and the target will be progressively reduced to 5 km, 1.5 km, 500 m, 225 m, 15 m, and 3 m.
- After the 3-meter process of docking will be done. The docking mechanism used here is a low-impact androgynous and peripheral docking system.
- The peripheral docking system uses a concept similar to the international docking system standard. Example American APDS.

SENSORS USED FOR SpaDeX MISSION.
Sensors like laser range finders and corner cube retroreflectors will be used to determine the range.
Rendezvous sensors help to determine both relative position and velocity independently.
Proximity and docking sensors are used to give relative position and velocity when spacecraft are in short range (30m to 0.4m).
A mechanism entry sensor is employed from 8 cm to 4 cm to identify the chaser into the target satellite during docking.